Allow our experienced staff to help you find the products that meet your unique GNSS needs!
What is GNSS?
You know GPS, right? The Global Positioning System? These days GPS is also used with other satellite systems which is called the Global Navigation Satellite System (GNSS). GNSS emcompasses satellite systems from different countries; GPS (US), GLONASS (Russia), Beidou (China) and Galileo (Europe). These satellites orbit the earth at about 22000 km and transmit signals that contain information traveling at the speed of light. These signals are tracked by your GNSS receiver which computes how long it took for the signal to arrive. You need at least four satellites in line-of sight to calculate a position, time and velocity. Your receiver can pinpoint your location by triangulation.
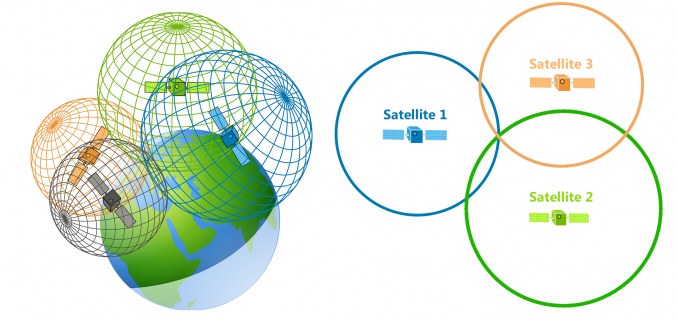
Triangulation (Ref.: https://gisgeography.com/trilateration-triangulation-gps/)
Also included in GNSS is the Satellite Based Augmented system (SBAS). SBAS are geostationary (GEO) satellites which broadcast additional information. SBAS provides ranging, corrections and integrity for satellite errors such as position, clock and delay traversing the ionosphere. With these corrections the position error accuracy can be below 1 meter (1 sigma). Some of these satellites systems are: WAAS (US), EGNOS (Europe), QZSS (Japan), and GAGAN (India). All these satellites systems make GNSS. Depending on your location and the receiver you are using you may not be able to use all GNSS satellites. For example, if you are in the US you will probably use GPS, GLONASS and SBAS (WAAS).
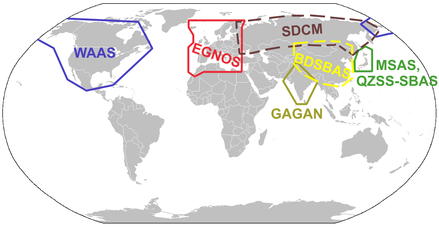
SBAS (Ref.: http://www.wikiwand.com/en/GNSS_augmentation)
What is INS?
An Inertial Navigation System (INS) uses measurements from an Inertial Measurement Unit (IMU). An IMU is made of accelerometer, gyroscope and sometimes a magnetometer. From the IMU acceleration and rotational information along with angular measurements, the INS computes a relative 3D position over time as well as roll, pitch and yaw (azimuth).
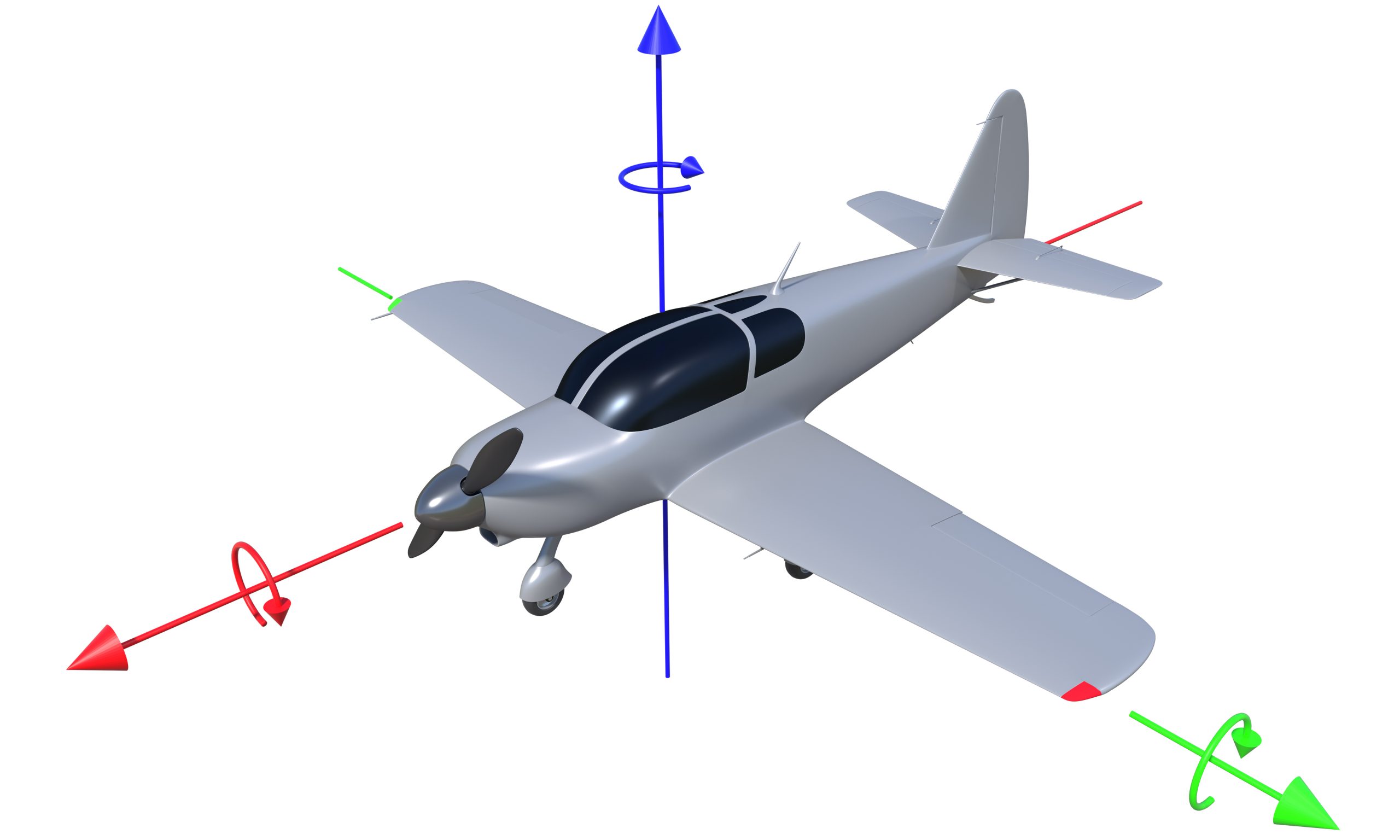
Aircraft Orientation (heading, roll and pitch) Rotation Axis
Inertial systems have come a long way and are now easily accessible. Thanks to the evolution of Microelectromechanical systems (MEMS)! MEMS is a process technology used to create tiny integrated devices or systems that combine mechanical and electrical components. MEMS accelerometer, gyroscope and magnetometer have brought new applications possible because of their reduced size, power and price.
Why GNSS & INS?
GNSS and INS are complementary to each other. The table below describes how each system comes to the rescue of the other.
| GNSS – Satellite Navigation | Inertial Navigation |
|---|---|
| High position velocity accuracy over the long term | High position velocity accuracy over the short term |
| Low measurement output rate | High measurement output rate |
| Uniform accuracy, independent of time | Accuracy decreasing over time |
| Not so good at orientation, Noisy attitude information (multiple antenna array) | Best at orientation, Accurate attitude information |
| Cycle slip and loss of lock | No signal outages |
| Not affected by gravity | Affected by gravity |
| Best at X & Y | Best at Z |
When combined, GNSS & INS, give us the best of both worlds:
- High precision position and velocity
- Precise attitude determination
- High data rate
- Navigation output during GNSS outages
- Cycle slips detection and correction
- Gravity vector determination
Explore TransiTiva Products

Inertial Labs – GNSS & Inertial Systems
Inertial Sense – μINS

Swift Navigation – Duro Inertial

SBG Ellipse – GNSS & Inertial Ellipse 2 Micro Series